王道
栈和队列
知识框架
- 线性表
- 操作受限
- 栈
- 顺序栈
- 链栈
- 共享栈
- 队列
- 循环队列
- 链式队列
- 双端队列
- 栈
- 推广
- 数组
- 一维数组
- 多维数组:压缩存储,稀疏矩阵
- 数组
- 操作受限
栈的应用(摘自清华大学数据结构c语言版)
- 进制转换
- 括号匹配的检验
- 行编辑程序
- 迷宫求解
- 表达式求解:(中缀表达式转后缀表达式,后缀转中缀,从左往右看,后出为左,表达式树的建立),前缀转中缀,从右往左看,先出为左,后缀表达式的计算,前缀表达式的计算
- 中缀转前后缀:括号法
- 1栈中缀转后缀vs2栈计算中缀$\color{yellow}{\text{p103,t11和课本不一致}}$
- 弹出表达式的时候会弹出两个数
循环队列长度的计算
- 取余的理解参考文献1
- 错误文献,参考文献2
- 分两种情况,明确Q.rear指向的元素为空,Q.front指向的元素不为空:
- Q.rear > Q.front: Q.rear - Q.front ${\textstyle\unicode{x2460}}$ < maxSize
- Q.rear < Q.front: maxSize - (Q.front - Q.rear) = maxSize + Q.rear - Q.front < maxSize ${\textstyle\unicode{x2461}}$
- ${\textstyle\unicode{x2460}}$ = ${\textstyle\unicode{x2461}}$ = (maxSize + Q.rear - Q.front) % maxSize
拓展:循环栈
栈(Stack)
栈的基本概念
栈的定义
- 栈( Stack)是只允许在一端进行插入或删除操作的线性表。首先栈是一种$\color{red}{\text{线性表}}$,但限定这种线性表只能在某一端进行插入和删除操作。
- 栈顶(Top):线性表允许进行插入删除的那一端。
- 栈底(Bottom)。固定的,不允许进行插入和删除的另一端。
- 空栈。不含任何元素的空表。
- $n$ 个不同元素进栈,出栈元素不同排列的个数为$\dfrac{1}{n+1}C_{2n}^n$($\color{red}{\text{卡特兰数}}$(Catalan))。
栈的基本操作
InitStack ( &S):初始化一个空栈s。
StackEmpty(S):判断一个栈是否为空,若栈s为空则返回true,否则返回false。
Push ( &S, x):进栈,若栈s未满,则将x加入使之成为新栈顶。
Pop ( &S, &x):出栈,若栈s非空,则弹出栈顶元素,并用x返回。
GetTop(S,&x):读栈顶元素,若栈s非空,则用x返回栈顶元素。
DestroyStack (&S):销毁栈,并释放栈s 占用的存储空间(“&”表示引用调用)。
栈的顺序存储结构
顺序栈的实现
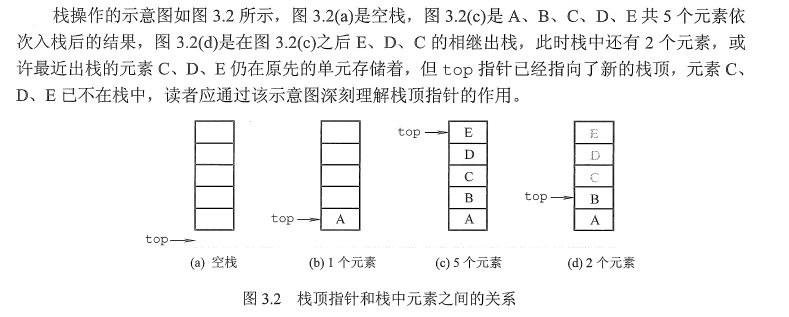
采用顺序存储的栈称为顺序栈,它利用一组地址连续的存储单元存放自栈底到栈顶的数据元素,同时附设一个指针(top)指示当前栈顶元素的位置。
1 |
|
- 栈顶指针:s.top,初始时设置s.top=-1;栈顶元素: s.data[s.top] 。
- 有的教辅可能初始时将(清华c语言版)s.top定义为0,相当于规定top 指向栈顶元素的下一个存储单元。
- 进栈操作:栈不满时,栈顶指针先加1,再送值到栈顶元素。
- 出栈操作:栈非空时,先取栈顶元素值,再将栈顶指针减1。
- 栈空条件: s.top==-1;栈满条件: s.top==MaxSize-1;栈长:s.top+1。
顺序栈的基本运算
初始化
1 | void InitStack(sqStack &S){ |
判栈空
1 | bool stackEmpty (sqstack s){ |
进栈
1 | bool Push (SqStack &S,ElemType x){ |
出栈
1 | bool Pop (SqStack &S,ElemType &x){ |
读栈顶元素
1 | bool GetTop (SqStack S,ElemType &x){ |
共享栈
利用栈底位置相对不变的特性,可让两个顺序栈共享一个一维数组空间,将两个栈的栈底分别设置在共享空间的两端,两个栈顶向共享空间的中间延伸。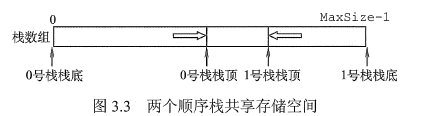
栈的链式存储结构
采用链式存储的栈称为链栈,链栈的优点是便于多个栈共享存储空间和提高其效率,且不存在栈满上溢的情况。通常采用单链表实现,并规定所有操作都是在单链表的$\color{red}{\text{表头}}$进行的。
1 | typedef struct Linknode{ |
队列
队列的基本概念
队列的定义
- 队列(Queue)简称队,也是一种操作受限的线性表,只允许在表的一端进行插入,而在表的另一端进行删除。
- 队头(Front)。允许删除的一端,又称队首。
- 队尾(Rear)。允许插入的一端。
- 空队列。不含任何元素的空表。
队列常见的基本操作
- InitQueue ( &Q):初始化队列,构造一个空队列Q。
- QueueEmpty(Q):判队列空,若队列Q为空返回true,否则返回false。
- EnQueue ( &Q,x):入队,若队列Q未满,将x加入,使之成为新的队尾。
- DeQueue (&Q,&x):出队,若队列Q非空,删除队头元素,并用x返回。
- GetHead (Q,&x):读队头元素,若队列Q非空,则将队头元素赋值给x。
队列的顺序存储结构
队列的顺序存储
1 |
|
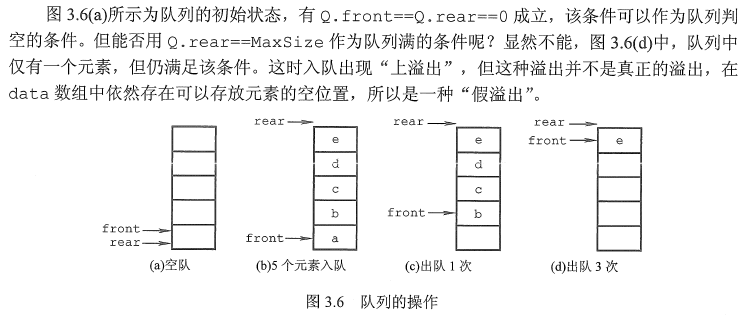
- 初始状态(队空条件): Q.front==Q.rear==O。
- 进队操作:队不满时,先送值到队尾元素,再将队尾指针加1。
- 出队操作:队不空时,先取队头元素值,再将队头指针加1。
循环队列
- 进和出都是+1
- 初始时: Q.front=Q.rear=O。
- 队首指针进1: Q.front=(Q.front+1) %MaxSize。
- 队尾指针进1: Q.rear=(Q.rear+1)%MaxSize。
- 队列长度:(Q.rear+MaxSize-Q.front)%Maxsize。
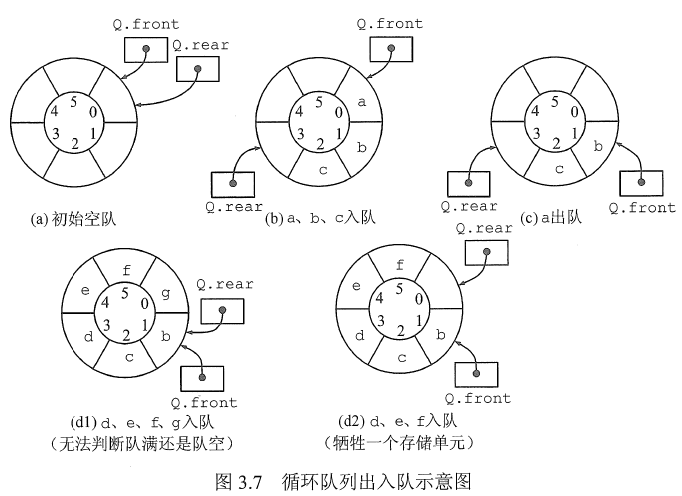
- 出队入队时:指针都按顺时针方向进1(如图3.7所示)。
- 为了区分队空还是队满的情况,有三种处理方式:
- 牺牲一个单元来区分队空和队满,入队时少用一个队列单元,这是一种较为普遍的做法,约定以“队头指针在队尾指针的下一位置作为队满的标志”
- 队满条件:(Q.rear+1)%MaxSize==Q.front。
- 队空条件仍: Q.front==Q.rear。
- 队列中元素的个数: (Q.rear-Q.front+MaxSize) % MaxSize
- 类型中增设表示元素个数的数据成员。这样,队空的条件为Q.size==0;队满的条件为Q.size==MaxSize。这两种情况都有Q.front==Q.rear。
- 类型中增设tag 数据成员,以区分是队满还是队空。tag 等于0时,若因删除导致Q.front==Q.rear,则为队空; tag等于1时,若因插入导致Q.front==Q.rear,则为队满。
- 牺牲一个单元来区分队空和队满,入队时少用一个队列单元,这是一种较为普遍的做法,约定以“队头指针在队尾指针的下一位置作为队满的标志”
循环队列的操作
初始化
1 | void InitQueue (SqQueue &Q){ |
判队空
1 | bool isEmpty (sqQueue Q){ |
入队
1 | bool EnQueue (SqQueue &Q,ElemType x){ |
出队
1 | bool DeQueue (SqQueue &Q,ElemType &x){ |
队列的链式存储结构
队列的链式存储
队列的链式表示称为链队列,它实际上是一个同时带有队头指针和队尾指针的单链表。头指针指向队头结点,尾指针指向队尾结点,即单链表的最后一个结点(注意与顺序存储的不同)。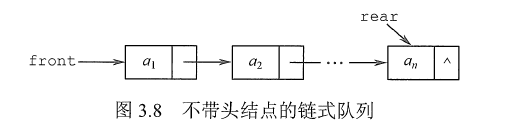
1 | typedef struct {//链式队列结点 |
链式队列的基本操作
初始化
1 | void InitQueue(LinkQueue &Q){ |
判队空
1 | bool IsEmpty(LinkQueue Q){ |
入队
1 | void EnQueue(LinkQueue &Q, ElemType x) { |
出队
1 | bool DeQueue (LinkQueue &Q,ElemType &x){ |
双端队列
双端队列是指允许两端都可以进行入队和出队操作的队列
栈和队列的应用
栈在括号匹配中的应用
初始设置一个空栈,顺序读入括号。
若是右括号,则或者使置于栈顶的最急迫期待得以消解,或者是不合法的情况(括号序列不匹配,退出程序)。
若是左括号,则作为一个新的更急迫的期待压入栈中,自然使原有的在栈中的所有未消解的期待的急迫性降了一级。算法结束时,栈为空,否则括号序列不匹配。
栈在表达式子求值中的应用
中缀表达式转化为后缀表达式的过程,见本章3.3.6节的习题11的解析,这里不再赘述。
栈在递归中的应用
- 简单地说,若在一个函数、过程或数据结构的定义中又应用了它自身,则这个函数、过程或数据结构称为是递归定义的,简称递归。
- 递归必须满足的条件
- 递归表达式(递归体)。
- 边界条件(递归出口)。
- 可以将递归算法转换为非递归算法,通常需要借助栈来实现这种转换。
- 递归的效率低下,优点是代码简单,容易理解
队列在层次遍历中的应用
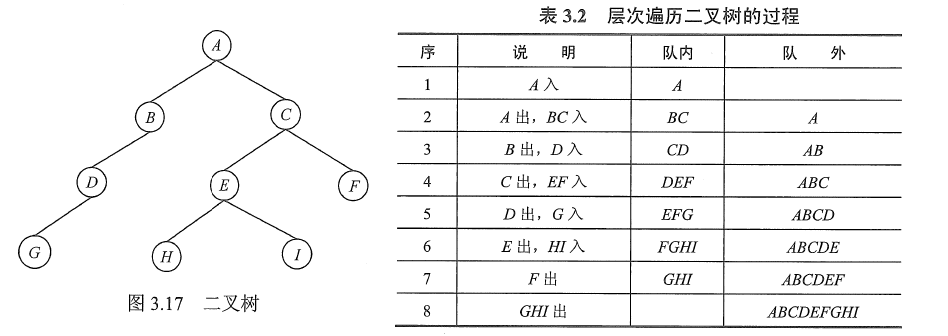
- ①根结点入队。
- ②若队空(所有结点都已处理完毕),则结束遍历;否则重复③操作。
- ③队列中第一个结点出队,并访问之。若其有左孩子,则将左孩子入队;若其有右孩子,则将右孩子入队,返回②。
队列在计算机系统中的应用
第一个方面是解决主机与外部设备之间$\color{red}{\text{速度不匹配}}$的问题。
对于第一个方面,仅以主机和打印机之间速度不匹配的问题为例做简要说明。主机输出数据给打印机打印,输出数据的速度比打印数据的速度要快得多,由于速度不匹配,若直接把输出的数据送给打印机打印显然是不行的。解决的方法是设置一个打印数据缓冲区,主机把要打印输出的数据依次写入这个缓冲区,写满后就暂停输出,转去做其他的事情。打印机就从缓冲区中按照先进先出的原则依次取出数据并打印,打印完后再向主机发出请求。主机接到请求后再向缓冲区写入打印数据。这样做既保证了打印数据的正确,又使主机提高了效率。由此可见,打印数据缓冲区中所存储的数据就是一个队列。
第二个方面是解决由多用户引起的$\color{red}{\text{资源竞争}}$问题。
对于第二个方面,CPU(即中央处理器,它包括运算器和控制器)资源的竞争就是一个典型的例子。在一个带有多终端的计算机系统上,有多个用户需要CPU各自运行自己的程序,它们分别通过各自的终端向操作系统提出占用CPU的请求。操作系统通常按照每个请求在时间上的先后顺序,把它们排成一个队列,每次把CPU分配给队首请求的用户使用。当相应的程序运行结束或用完规定的时间间隔后,令其出队,再把 CPU分配给新的队首请求的用户使用。这样既能满足每个用户的请求,又使CPU能够正常运行。
特殊矩阵的压缩存储
数组的定义
- 数组是由n (n>1) 个相同类型的数据元素构成的有限序列,每个数据元素称为一个数组元素,每个元素在n个线性关系中的序号称为该元素的下标,下标的取值范围称为数组的维界。
- 数组是$\color{red}{\text{线性表的推广}}$。
- 一维数组可视为一个线性表;二维数组可视为其元素也是定长线性表的线性表,以此类推。数组一旦被定义,其维数和维界就不再改变。因此,除结构的初始化和销毁外,数组只会有存取元素和修改元素的操作。
数组的存储结构
- 逻辑意义上的数组可采用计算机语言中的数组数据类型进行存储,一个数组的所有元素在内存中占用一段连续的存储空间。
矩阵的压缩存储
- 压缩存储:指为多个值相同的元素只分配一个存储空间,对零元素不分配存储空间。其目的是为了节省存储空间。
- 特殊矩阵:指具有许多相同矩阵元素或零元素,并且这些相同矩阵元素或零元素的分布有一定规律性的矩阵。常见的特殊矩阵有对称矩阵、上(下)三角矩阵、对角矩阵等。
- 特殊矩阵的压缩存储方法:找出特殊矩阵中值相同的矩阵元素的分布规律,把那些呈现规律性分布的、值相同的多个矩阵元素压缩存储到一个存储空间中。
对称矩阵
为此将对称矩阵A[ 1…n ] [ 1…n]存放在一维数组B[ n (n+1)/2]中,即元素$a_{i,j}$(i行j列), 存放在$b_k$中。只存放下三角部分(含主对角)的元素。(由下三角的轮换对称性得到上三角元素的公式)(首项+末项=i,项数=i-1,坐标为j,-1是因为数组从零开始数)
$$
k = \begin{cases}
\dfrac{i(i-1)}{2} + j - 1 & i \geq j (下三角区和主对角线元素) \cr
\dfrac{j(j-1)}{2} + i - 1 & i < j(上三角区元素a_{ij} = a_{ji})
\end{cases}
$$
三角矩阵
下三角矩阵(上三角为常量),i行j列(推导:等差数列求和)
$$
k = \begin{cases}
\dfrac{i(i-1)}{2} + j - 1 & i \geq j (下三角区和主对角线元素) \cr
\dfrac{n(n+1)}{2} & i < j(上三角区元素)
\end{cases}
$$
上三角矩阵,i行j列( 项数=i-1,首项加末项=($\color{green}{\text{n}}$ + $\color{green}{\text{(n-(i-1)+1)}}$) ),第i行的第j个加的偏置为(j-(i-1)),数组是从零开始数的再-1为j-i
$$
k = \begin{cases}
\dfrac{(i-1)(2n-i+2)}{2} + j - i & i \geq j (上三角区和主对角线元素) \cr
\dfrac{n(n+1)}{2} & i < j(下三角区元素)
\end{cases}
$$

三对角矩阵
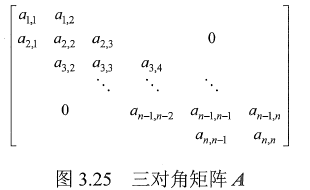
- 对角矩阵也称带状矩阵。对于n阶方阵A中的任一元素 $a_{i,j} ,\text{当}\lvert i –j\rvert>1 \text{时,有}a_{i,j}= 0 (1< i, j \text{\textless} n)$,则称为三对角矩阵,如图3.25所示。前$i-1$行共$3(i-1)-1$个元素,$a_{i,j}$是第$i$行第$j-i+2$个元素,$a_{i,j}$是第$2i+j-2$个元素,$k=2i+j-3$
$$
k = 2i + j- 3
$$

已知三对角矩阵中某元素$a_{i,j}$存放于一维数组B的第$k$个位置,则可得$i=\lfloor \dfrac{k+1}{3}+1 \rfloor$,$j=k-2j+3$ (i很好理解,因为可以理解为每行三个元素$i=\lceil \dfrac{k+1}{3} \rceil$)
稀疏矩阵
矩阵中非零元素的个数t,相对矩阵元素的个数s来说非常少,即$s \gg t$的矩阵称为稀疏矩阵。例如,一个矩阵的阶为100×100,该矩阵中只有少于100个非零元素。
稀疏矩阵的三元组既可以采用数组存储,也可以采用十字链表法存储。